This dataset contains a collection of 165 robots. For each robot we collected descriptions of the robot, design metaphors, social expectations, and functional expectations. Download the dataset using the download button on the left side of this page.
Robot Descriptors
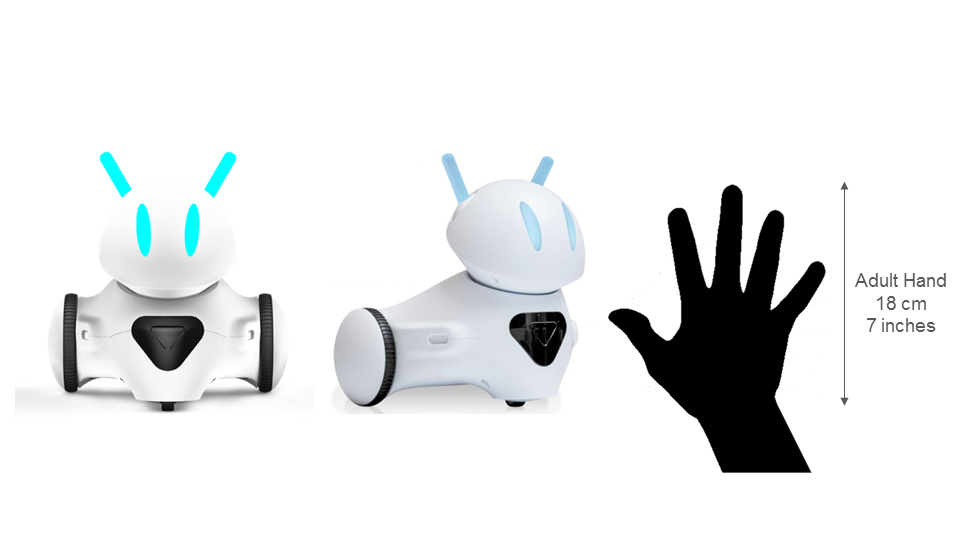
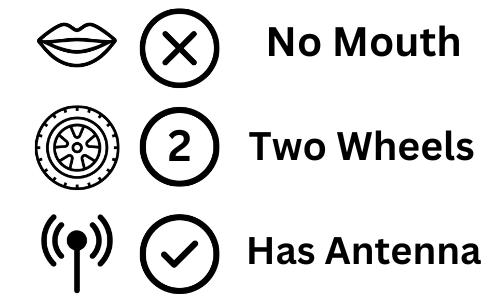
43 binary features, 4 ordinal features, and 5 continuous features
The robot descriptors were collected by a group of researchers. The researchers hand-labeled each design feature, which corresponds to physical elements present on the robot.
Design Metaphors
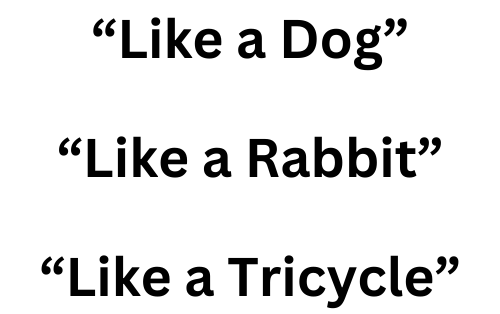
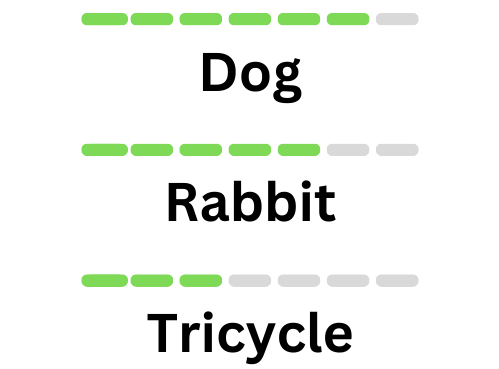
Design metaphors are people, animals, things, or concepts that participants are reminded of when viewing the design of the robot. The level of abstraction corresponds to how literal or abstractly this idea implemented in the robot’s design.
Social Expectations

Social expectations describe the robot’s identity and ability for social interaction, as determined by the robot’s embodiment. These attributes encapsulate how a participant relates to and interacts with the robot.
Functional Expectations

Functional Expectations describe what the robot is physically expected to do. Participants also evaluated how well-aligned the robots design is with the tasks they expected it to perform.